Technologie a její historický vývoj
Celkový systém LEV lze blokově rozdělit na několik částí, které zobrazuje obrázek 1.
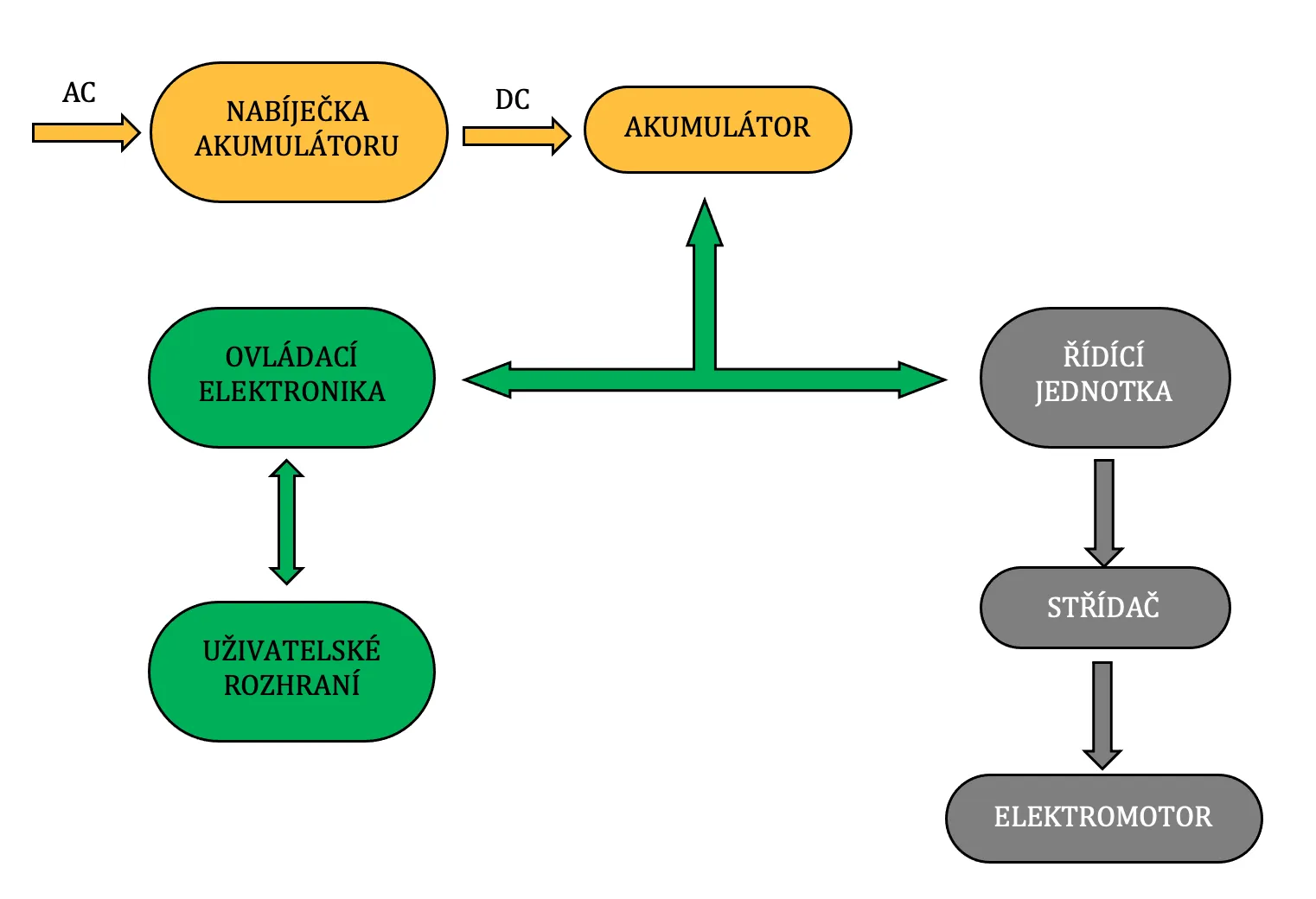
Obr. 1 Blokové schéma systému LEV
Výše zobrazené blokové schéma je barevně rozděleno do 3 kategorií, kde oranžová barva představuje napájení celého systému, zelená brava představuje komunikační a řídící členy a šedá barva představuje akční členy pro pohon a pohon samotný.
Napájení systému
Napájení LEV je v dnešní době provedeno pomocí akumulátorů. Historicky bylo možné jako první využít olovněné (Pb) akumulátory, které byly vynalezeny v roce 1859. Jednalo se o první nabíjitelnou baterii, kterou vynalezl Gaston Planté. Konstrukčně se jednalo o otevřený článek, kde byl elektrolyt ve styku s okolím. Od tohoto vynálezu dále vznikaly další typy akumulátorů jako například niklkadmiové (NiCd), které fungovali od roku 1899 a měli být lepším následníkem Pb akumulátorů. Používali se zejména až do období 1990, kde je následně nahradily akumulátory niklmetalhydridové (NiMH). K této náhradě došlo kvůli toxicitě kadmia a s tím plynoucí neekologičností, která se začala v tomto období řešit. NiMH vyřešili ekologičnost NiCd baterií, ale ponechali si jinou nevýhodu, a to paměťový efekt. Vývoj akumulátorů pokračoval a vznikaly akumulátory niklželezné (NiFe), niklzinkové (NiZn) a niklhydrogenové (NiH). [3]
Dalším velkým krokem ve vývoji akumulátorů bylo v roce 1991 využití lithium iontových (Li-ion) akumulátorů. Lithium má nejlepší elektrochemický potenciál a poskytuje nevyšší hustotu energie na kilogram. Lithium bylo v akumulátorech využito už dříve v období 1980, ale jednalo se o konstrukce akumulátorů, které nebyly bezpečné a docházelo u nich ke vznícení (neboli tepelnému úniku). Tento problém byl částečně vyřešen u specifikace Li-ion, která byla bezpečná a poskytovala velké výhody lithia. Obecně, kromě zmíněného Li-ion akumulátory přinesly nejvyšší životnost z doposud využitých typů akumulátorů.
Olověné akumulátory z pohledu LEV
Jedná se o typ akumulátorů, které nejsou v dnešní době příliš využívány. Hlavním důvodem může být malá hustota energie na kilogram, ze které plyne nárůst hmotnosti baterie s požadavkem na vyšší kapacitu baterie. A právě hmotnost baterie je jeden ze zásadních parametrů pro LEV, které už z názvu mají být lehká elektrická vozidla. Dále také životnost je u těchto akumulátorů nižší než u ostatních typů a ekologická zátěž olova také tomuto typu příliš nepomáhá. V souhrnu se tedy nejedná o typ akumulátoru, který by měl být využíván v budoucnu právě pro LEV. Vývoj těchto baterií nezastavuje a předpokládá se jejich využití spíše v jiných odvětvích. Experti věří, že olověné akumulátory mají stále výrazný nevyužitý potenciál. [3]
Akumulátory na bázi niklu z pohledu LEV
Na rozdíl od Pb akumulátorů u akumulátorů na bázi niklu najdeme i v dnešní době využití, a to v podobě NiMH akumulátorů. Výhodou těchto akumulátorů je vyšší hustota energie na kilogram než například u olovněných, což vede k menším potřebným rozměrům pro dosažení potřebné kapacity. Nevýhodou tohoto typu je rychlé samovybíjení a životnost, která může být až 10x nižší než u lithiových akumulátorů. V pohledu do budoucna se tedy očekává spíše ústup od NiMH akumulátorů na úkor lithiových akumulátorů. [3]
Lithium iontové akumulátory z pohledu LEV
Jedná se o aktuálně nejvyužívanější typ akumulátoru pro LEV. Li-ion nemá žádný paměťový efekt a nepotřebuje plné vybíjecí cykly k udržení v dobrém stavu. Samovybíjení je o polovinu menší než u akumulátorů na bázi niklu. Jmenovité napětí článku je 3,6 V, což je také vyšší než u doposud zmíněných typů. Mezi další výhody patří vysoká energetická hustota asi 200 až 250 Wh/kg (potenciálně až 410 Wh/kg), vysoká účinnost v rozmezí 95 % - 98 % a variabilita možné rychlosti vybíjení od jednotek sekund až po týdny. Životnost se pohybuje kolem 5000 cyklů, ale i více v závislosti na použitých materiálech elektrod. [3]
Nevýhodou je jejich vysoká cena v porovnání s jinými bateriemi a možné vysoké přehřívání v důsledku přílišného vybíjení/nabíjení – nutno senzoricky kontrolovat a regulovat.
Elektromotory pro LEV
Elektromotor je stroj, který slouží k přeměně elektrické energie na mechanickou energii. Mezi aktuálně nejpoužívanější elektromotory pro LEV patří zejména synchronní motory s permanentními magnety (PMSM) a stejnosměrné bezkartáčové motory (BLDC). V obou případech se jedná o synchronní stroje, ale rozlišují se tvarem indukovaného elektromagnetického pole, kde u PMSM je pole sinusové a u BLDC motoru je pole lichoběžníkové. Historický vývoj těchto motorů je popsán v následujících podkapitolách.
Historie stejnosměrných motorů (DC motory)
První podnět ke vzniku elektromotorů nepřímo zajistil v roce 1820 dánský fyzik Hans Christian Ørsted, který experimentoval s elektřinou a vypozoroval vliv elektrického proudu na střelku kompasu. Objevil elektromagnetismus, tedy vznik magnetického pole vlivem toku elektrického proudu. V návaznosti na to v roce 1821 Michael Faraday jako první demonstroval efekt objevu Hanse Christiana Ørsteda. Jednalo se o kus drátu, který byl volně zavěšen do nádoby s rtutí (kov, který je v kapalném stavu při pokojové teplotě), ve které byl také umístěn magnet. Drát byl připojen k jednomu potenciálu baterie a rtuť k druhému potenciálu baterie, což vyvolalo průtok proudu. Drát začal okolo magnetu rotovat a demonstroval tedy vznik magnetického pole vlivem průtoku elektrického proudu. Rotace byla zapříčiněna silovým působením magnetického pole magnetu na vzniklé magnetické pole okolo vodiče. [4]
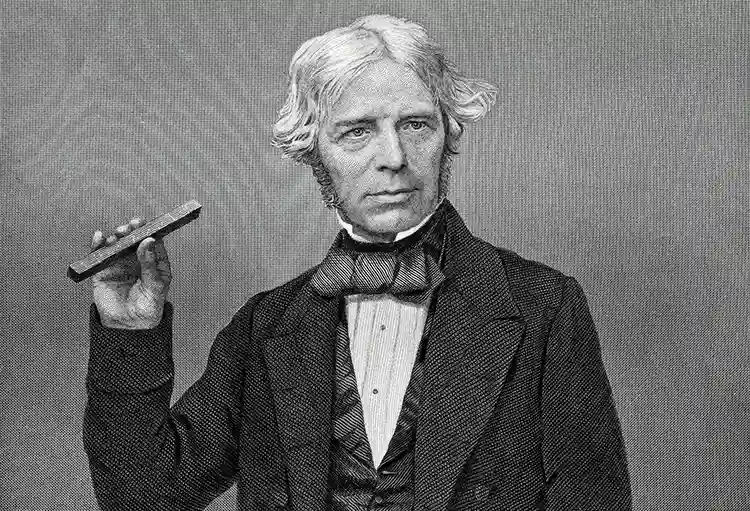
Obr. 2 Michael Faraday [5]
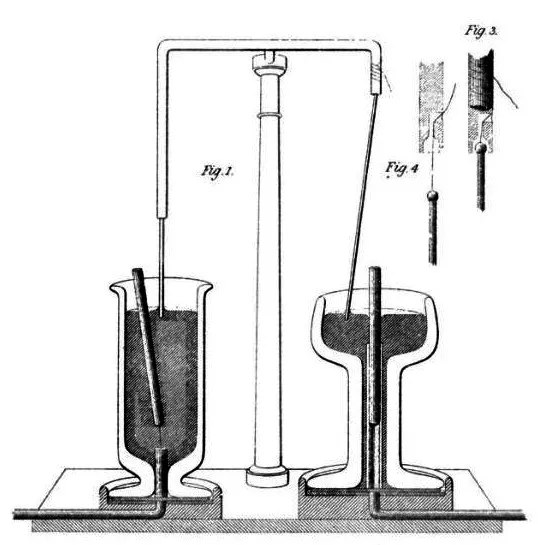
Obr. 3 Experiment Michaela Faradaye [4]
Další zásadní objev učinil v roce 1828 maďarský fyzik Ányos Jedlik, který vynalezl komutátor a použil ho ve svém zařízení, které nazval „elektromagnetic self-rotor“, což po překladu znamená: „elektromagnetický samotoč“. Jednalo se o první zkonstruovaný „motor“ se třemi zásadními komponenty DC motorů do budoucna: stator, rotor, komutátor.
Následně v roce 1832 anglický fyzik William Sturgeon vynalezl první elektrický motor, který byl napájen stejnosměrným napětím. Technickým řešením se jednalo o první motor, který byl schopný pohybovat se stroji, ale výstupní výkon byl velmi malý. Následně na základě tohoto vynálezu vznikaly podobné konstrukce, které ovšem stále nebyly prakticky použitelné. Nejvíce významným vynálezem v tomto období byl motor ruského fyzika Moritz Von Jacobi, který v roce 1834 stanovil světový rekord pro výstupní mechanický výkon motoru. V roce 1835 Moritz Von Jacobi motor upravil a demonstroval novou konstrukci přepravením 14 lidí přes řeku lodí, která byla tímto upraveným motorem poháněna.
Veškeré DC motory které v polovině 19. století vznikaly nebyly stále praktické. Vyskytovaly se u nich napěťové ztráty mezi vynutími, nestálý proud a jiskření. Zmíněné nedostatky byly poprvé odstraněny s prvním praktickým elektromotorem v roce 1886, který zkonstruoval italský fyzik Antonio Pacionotti a belgický elektrický inženýr Zénobe Gramme, ovšem pouze americkému vynálezci Frank Julian Spraugue je připsán tento vynález. Jednalo se o motor, kde bylo eliminováno jiskření, napěťové ztráty u vynutí a byl schopný dodávat konstantní výkon o konstantní rychlosti. Účinnost těchto motorů byla i tak stále nízká.
Revoluční design přišel v roce 1921 od týmu z Ameriky, který zvýšil spolehlivost a účinnost elektromotoru. Účelem bylo se vyhnout poškození vlivem tření a usnadnění „průtoku“ elektromagnetického toku pomocí menší vzduchové mezery mezi rotorem a statorem s čímž přišlo zvýšení účinnosti. Jednalo se o první DC motory, které odpovídají konstrukčně dnes známým stejnosměrným motorům s komutátorem a kartáči (kde je stator tvořen z permanentních magnetů, druhou variantou je stator také složen z vinutí).

Obr. 3 Základní konstrukce DC motoru [6]
Tento typ konstrukce vzhledem ke komutátoru a kartáčům, u kterých dochází k opotřebování, zabránil DC motorům širšímu využití u vysoko výkonových aplikacích a také v elektrických vozidlech. Změna přišla v roce 1962, kdy byl vynalezen DC motor bezkartáčového typu (dnes známý jako BLDC motor). Hromadné využití BLDC motorů přišlo v roce 1982. [7], [8]
BLDC Motor
Jedná se o stejnosměrné motory, které nemají mechanický komutátor a na něj doléhající kartáče. Funkci komutátoru zde provádí elektronika, která střídá napájení jednotlivých vinutí statoru. Rotor je složen z permanentních magnetů. V porovnání s klasickým komutátorovým DC motorem je zde konstrukční uspořádání obrácené. Klasický DC motor má stator složen z permanentních magnetů (popřípadě statorového vinutí), které zajišťuje elektromagnetické buzení. Rotor je složen z vinutí uloženého v drážkách, které je napájené přes kartáče přiložené ke komutátoru. U BLDC motorů na rozdíl od klasických DC motorů rotuje elektromagnetický budič (tzn. Permanentní magnety v rotoru). Konstrukčně lze BLDC motory rozdělit na BLDC motory s rotorem vně a uvnitř statoru. Elektromotor s rotorem uvnitř statoru má za hlavní výhodu vysokou rychlost otáčení. U elektromotoru s rotorem vně statoru je hlavní výhodou vyšší moment. Oboje konstrukční provedení mají své uplatnění pro pohon LEV. Konstrukci s vnitřním rotorem lze uplatnit například pro elektrokola, kde je motor umístěn v oblasti šlapek. Vnější rotor se může využít například u elektrokoloběžek, kde se elektromotor umísťuje do kola elektrokoloběžky.
Historie střídavých motorů (AC motory)
První zmínka otáčivého magnetického pole je z roku 1824, kdy francouzský fyzik François Arago formuloval „Arago's rotations“, což byla pozorování interakcí mezi magnetickou jehlou a pohyblivým diskem. Jednalo se o překvapivá pozorování, které byly v té době těžko vysvětlitelné (v roce 1831 byly vysvětleny Michaelem Faradayem, který představil teorii elektromagnetické indukce). V roce 1879 Walter Baily pomocí manuálního vypínání a zapínání demonstroval první primitivní indukční motor. První motor na střídavý proud vynalezl Galileo Ferrari v roce 1885. V roce 1887 Nikola Tesla vynalezl indukční motor a získal na něj patent v květnu roku 1888. Ve stejném roce prezentoval jeho spis „A New System of Alternate Current Motors and Transformers“ americkému institutu elektrických inženýrů (AIEE- American Institute of Electrical Engineers), ve kterém byly popsány tři patentované dvoufázové čtyř-statorové typy motorů. AC motory s konstantní otáčivou rychlostí se ukázaly jako nevhodné pro pohon městských aut, ale v roce 1891 byly úspěšně použity pro hornické/důlní operace v Colorádu. Stále se ovšem jednalo o dvoufázové motory s vinutými rotory. Třífázový indukční motor vynalezl ruský vynálezce Mikhail Osipovich Dolivo-Dobrovolsky v roce 1889. Vynalezl jak typ s klecovým rotorem, tak s vinutým rotorem. V roce 1896 došlo k podpisu dohody mezi významnými výrobními společnostmi motorů (General Electric Company a Westinghouse) ohledně konstrukce rotoru (v té době nazván jako „bar-winding-rotor design“ a později nazývaný jako „squirrel-cage rotor“). [4]
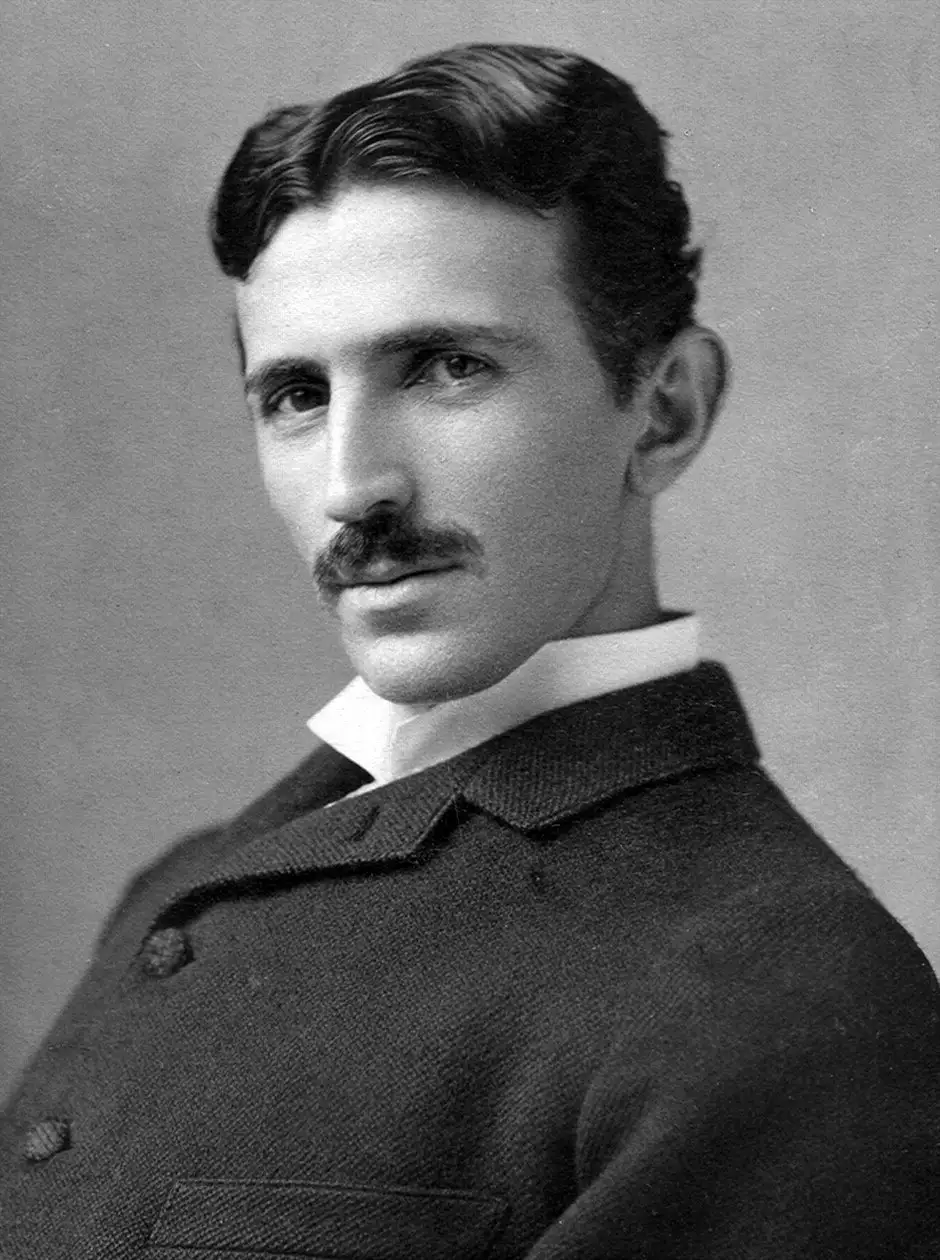
Obr. 4 Nikola Tesla [9]
PMSM Motor
Konstrukčně se jedná o velmi podobný stroj jako stroj asynchronní. Stator je tvořen elektrotechnickými plechy, v jehož drážkách je uloženo vinutí. Rotor je složen z permanentních magnetů. Rozdílnost oproti BLDC motoru je dána konstrukcí statoru a uložení statorového vinutí, které vytváří sinusové magnetické pole ve vzduchové mezeře motoru, což ho připodobňuje k indukčnímu AC motoru. Pokud třífazové statorové vinutí napájíme harmonickým zdrojem, vzniká uvnitř stroje rotující magnetické pole. Rotor se vždy snaží zaujmout takovou pozici, aby měl magnetický obvod co nejmenší magnetický odpor. Díky tomuto jevu se rotor otáčí stejnou rychlostí, jakou se mění magnetické pole statoru, tedy synchronní. To vše má za následek menší ztráty, nižší hmotnost motoru a také samozřejmě menší rozměry. Vzhledem k permanentním magnetům v rotoru dokáže generovat moment i při nulových otáčkách, což pro použití v LEV představuje velkou akceleraci. Opět je potřeba řídit motor elektronicky, kde u PMSM motoru je to provedeno pomocí střídače. Řízení je provedeno vektorově. Stejně jako u BLDC motoru lze PMSM motor zkonstruovat s vnitřním a vnějším rotorem. [10], [11], [12]
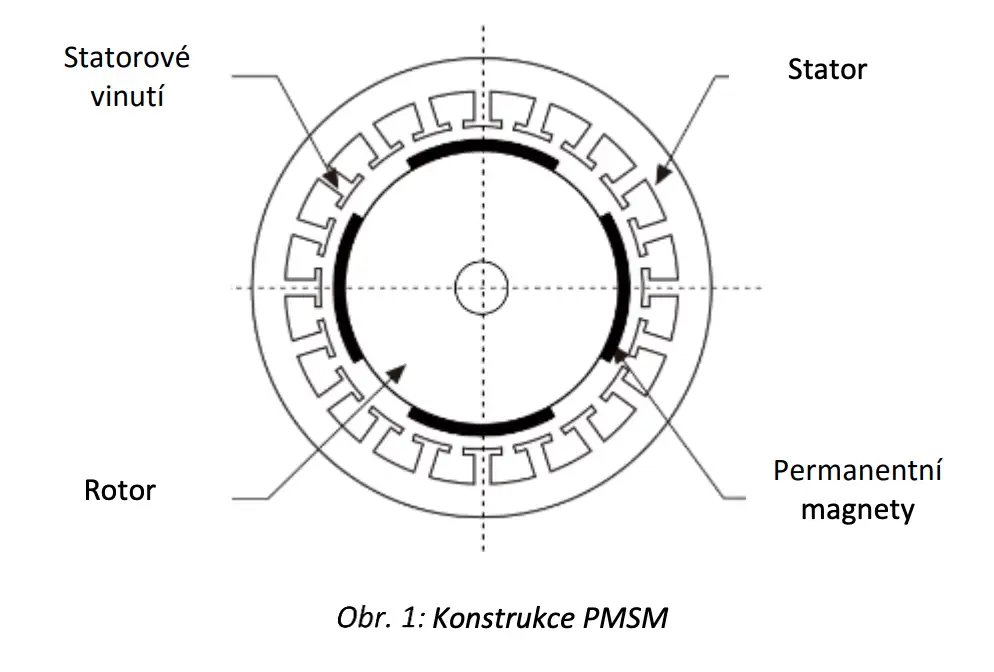
Obr. 5 Konstrukce PMSM motoru [12]